Часть 1 МЕХАНИКА
Раздел 1 КИНЕМАТИКА
1.3. Ускорения. Ускорение при криволинейному руси
Градиент скорости материальной
точки V со временем £ характеризуют ускорением

Ускорение выражается в метрах на
секунду в квадрате (СИ) и сантиметрах на секунду в квадрате (СГС).
При прямолинейном движении вектор
скорости направленный вдоль одной и той же прямой - траектории, вследствие
чего направление вектора  совпадает с направлением вектора
совпадает с направлением вектора  или противоположный
него. Если совпадает
по направлению с ,
то скорость увеличивается и движение будет ускоренным. Если противоположное по направлению к , то скорость
уменьшается и движение будет замедленным.
или противоположный
него. Если совпадает
по направлению с ,
то скорость увеличивается и движение будет ускоренным. Если противоположное по направлению к , то скорость
уменьшается и движение будет замедленным.
Прямолинейное движение с постоянным
ускорением называют рівнозмінним. В зависимости от изменения скорости во времени
различают равномерно ускоренное и равномерно замедленное движения. При
рівнозмінному прямолинейном движении справедлива формула

где
- скорость в момент времени t; 0- скорость в начальный момент времени
(при t = 0); - ускорение. При этом векторы , 0, направлены вдоль одной
прямого.
Определим ускорение точки в случае
ее движения по криволинейной траектории (рис. 1.2). Пусть в момент времени t точка была в положении А, а в момент
времени t + Δt
- в положении В.
Скорости 1и 2 в точках А и В направлены по касательным к траектории в
этих точках. Перенесем вектор 2 в точку А. Изменение скорости за промежуток времени Δt определится вектором  С рис. 1.2. видим, что
С рис. 1.2. видим, что

Тогда
ускорение в точке А запишем так:

Вектор  называют нормальным ускорением, а вектор
называют нормальным ускорением, а вектор  - тангенциальным. Ускорение n перпендикулярное к вектору скорости 1 и всегда напрямлене к центру кривизны. Отсюда и название
этого вектора - нормальный (т.е. перпендикулярен).
- тангенциальным. Ускорение n перпендикулярное к вектору скорости 1 и всегда напрямлене к центру кривизны. Отсюда и название
этого вектора - нормальный (т.е. перпендикулярен).
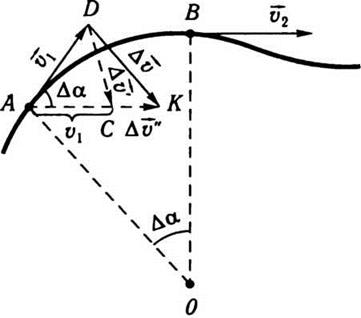
Рис. 1.2.
Определим модуль нормального
ускорения. Как видно из рис. 1.2, для малого угла Δα можно записать

Тогда

Следовательно, модуль п в некоторой точке
траектории равна отношению квадрата скорости к радиусу кривизны
траектории в этой же точке:

Если на нормали к траектории
отложить в точке А единичный вектор  , направленный к центру кривизны, то
вектор нормального ускорения можно записать так:
, направленный к центру кривизны, то
вектор нормального ускорения можно записать так:

Рассмотрим теперь вектор
тангенциального ускорения
Отметим, что модуль вектора Δ’ равен по абсолютной величине
разницы модулей 2 и 1 (см. рис. 1.2). Тогда

Соответственно тангенциальное ускорение

Следовательно, значение тангенциального
ускорение равно первой производной от скорости по времени или второй
похідній_від пути. Направление вектора τ
определяется направлением вектора Δ’, который он приобретает в предельном
случае, когда Δt -> 0. Нетрудно увидеть, что в предельном случае вектор Δ’ направленный по касательной к траектории
в точке А. Отсюда и название этого вектора - тангенциальный (касательный). Если
ввести единичный вектор  , касательный к траектории и обращен в
сторону движения точки, то вектор тангенциального ускорения можно записать так:
, касательный к траектории и обращен в
сторону движения точки, то вектор тангенциального ускорения можно записать так:

Вектор τ
показывает, как изменяется скорость за числовым значением, а вектор n характеризует изменение скорости по
направлению. Следовательно, для полного ускорения запишем

Модуль вектора
общего ускорения найдем из соотношения
